vincent | 4 months ago | 12 comments | 2 likes | 369 views
vincent | 4 months ago | 12 comments | 2 likes | 369 views
songbaojin and liuyongcai like this!
1) Will it one day be possible to attach a container to a joint on robotic arms as is done on animated models?
This would open up enormous possibilities by combining the capabilities of animated GLBs and robotic arms.
Thank you.
2) to have the possibility to adjust ground level for invers kinematics


Remember that the robotic arm layer was introduced before GLB. If it was the other way round, you would have had what you wanted. So probably the best way is to make the robotic arm layer support the GLB format. Thank you for your request!

michiel, 4 months ago
I have no idea about the technical constraints but I suppose the solution would indeed be to convert the Robotic Arms to GLB (. But above all, we mustn't lose the kinematic concepts that give the Robotic Arms their power. Thank you.
About then 2nd question, is it possible to have the parameter ? Thanks.
vincent, 4 months ago
In a 3D world it's a shame to limit the movements of spiders, centipedes, and mammals to 2D plan.
Furthermore it makes more sense to be able to move them up and down than to move the ground.
vincent, 4 months ago
I do not understand what you mean with "virtual ground".
The robotic arm layer assumes the floor is at vertical position 0. This floor can be very real. For example when you use a model of a dance floor where the position of the floor is at 100, simply place this model at vertical position -100 (2nd slider of the POSITION prop of the model layer). This way the floor is rendered at 0 so it can be used by the robotic arm layer.
Or do you want to move the robotic arm closer to the floor? Do do that use the 2nd slider of the POSITION prop of the robotic arm layer.
michiel, 4 months ago
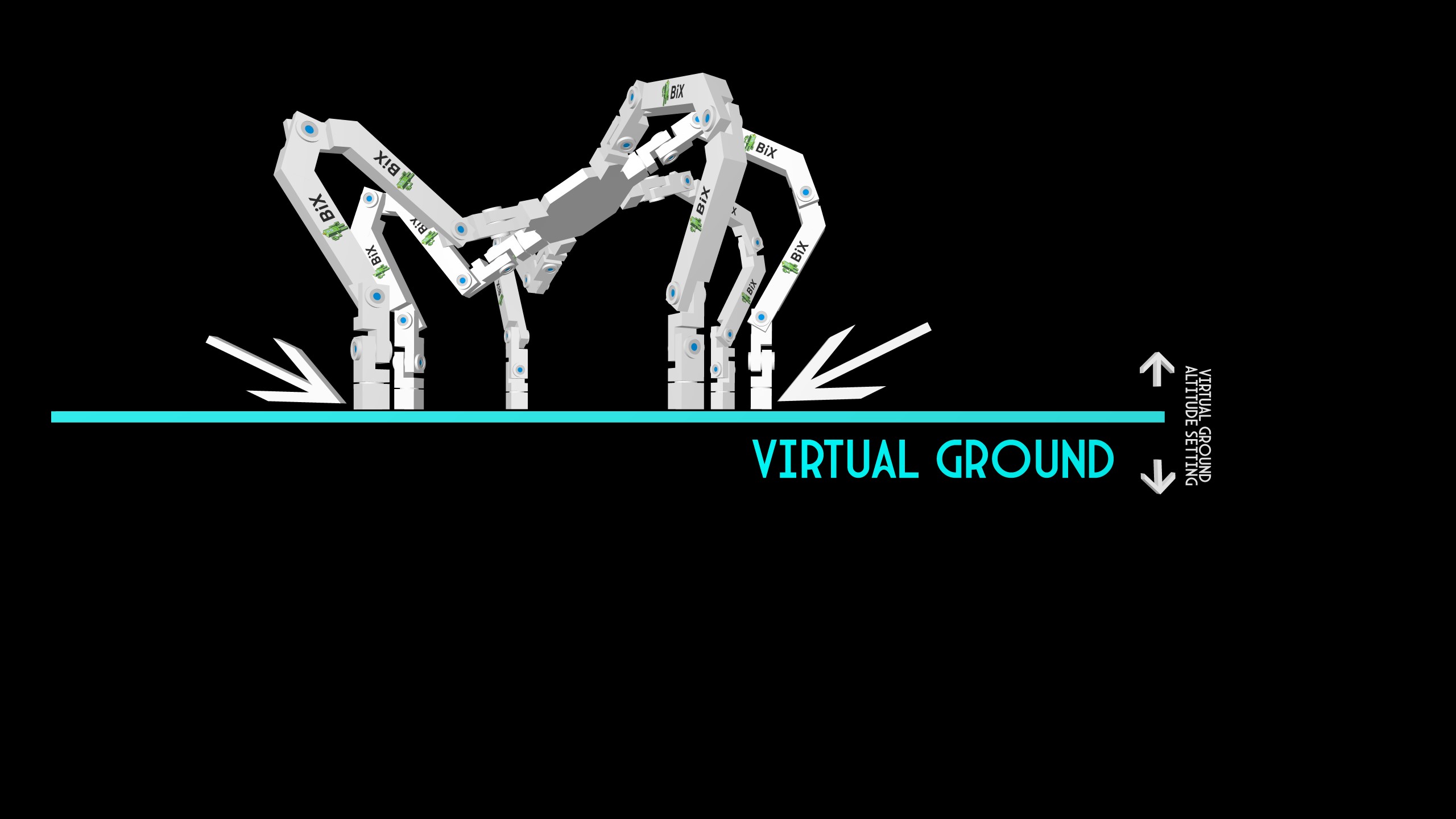
What I call "virtual ground" is actually the level (blue line in video) of the spider's feet.
It's the ground on which the spider walks. But this level is unique and fixed. For example, you cannot make two spiders walk at different heights with the same movements.
What I would like is to be able to adjust the height of this reference floor in the Robotic Arm layer.
vincent, 4 months ago
You are right that you can't make spiders walk on different floor heights, but apart from that I don't see limitations.
michiel, 4 months ago
Admit that being forced to place the different arms on the same horizontal plane is frustrating.
It would be enough to make this parameter variable. Is it possible ? thanks.
vincent, 4 months ago
We'd like to keep BluffTitler small and simple. The robotic arm layer does not yet have many props, so maybe a FLOOR POSITION prop won't do that much harm. Thank you for your request.
michiel, 4 months ago
Your feature requests have been added to the 2DO list.
Thanks again for your requests!
michiel, 4 months ago