 michiel | 4 years ago | 5 comments | 6 likes | 1.2K views
michiel | 4 years ago | 5 comments | 6 likes | 1.2K views
Dani, gato@mo, LostBoyz and 3 others like this!
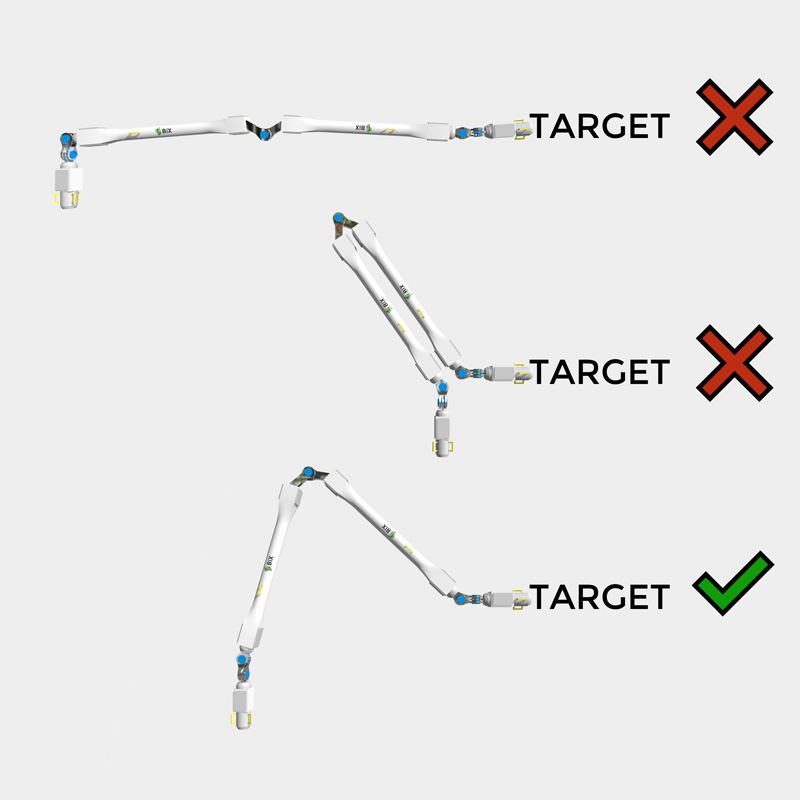
Robotic arms have joints, but are not elastic. This means that they have a limited range.
When using inverse kinematics, be careful not to place the robotic arm too far from its target. And also not too close. Just like you own arm, there's an optimum, comfortable distance.
The robotic arm can be moved with its POSITION property. But of course you can also move the target layer.
Another way is to adjust the size of the arm with its SIZE property. And when the target is a sketch layer, you could try resizing the sketch with its SIZE prop.


Thnx Michiel. There's a lot to learn.
Filip, 4 years ago
In the BixPack templates we tried to keep the robotic arms at a comfortable distance from their targets.
michiel, 4 years ago
Thanks Michiel, this thing was intuitive
because if the arm is too far or too close
the junction can't follow the path
due to the length of the arm.
thanks for the clarification

Franco Aversa, 4 years ago


And when using the spider style, it works best placing the spider at a comfortable distance to the floor.
michiel, 4 years ago
Comment to this article
More by michiel


























About michiel
Michiel den Outer is the founder and lead coder of Outerspace Software. He lives in Rotterdam, the Netherlands.
If he isn't busy improving BluffTitler, he is playing the piano or rides the Dutch dikes on his bikes.
858 articles 4.4M views
Contact michiel by using the comment form on this page or at info@outerspace-software.com